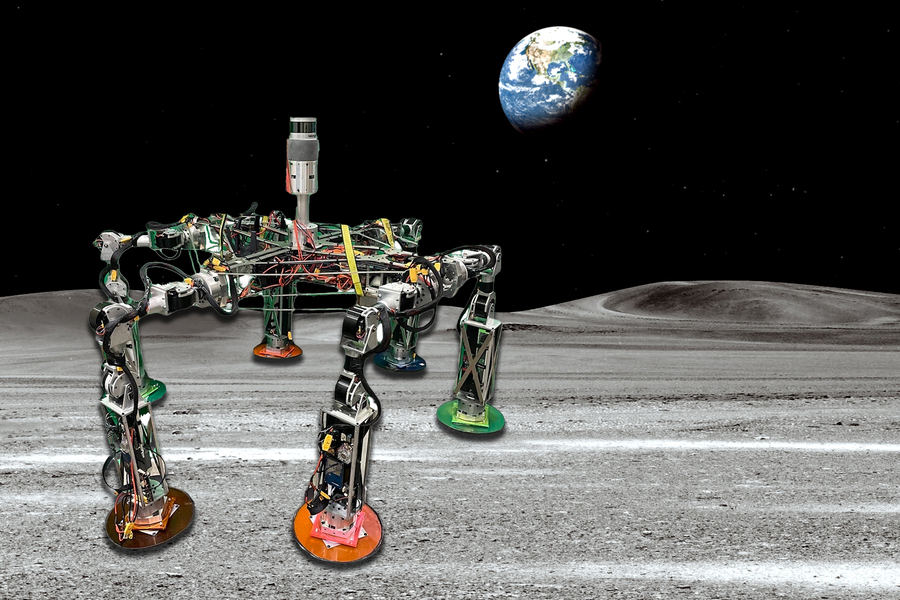
MIT engineers have designed a walking lunar robot called WORMS, or the Walking Oligomeric Robotic Mobility System. Consisting of worm-inspired robotic limbs, this robot can be easily configured and reconfigured for various missions on the moon. For this innovative job, researchers won the Best Paper Award at the Institute of Electrical and Electronics Engineers (IEEE) Aerospace Conference.
Mix-and-Match
It is designed in a way that its “mix-and-match” system could help it configure into various “species” of robots resembling spiders, elephants, goats, and oxen.
In future moon missions, astronauts will need robots to perform a lot of functions such as heavy lifting by laying cables, deploying solar panels, building habitats, and a lot more. So, for performing all these tasks, and avoiding a cluster of different robots, they have developed WORMS.
Depending on the mission, parts can be configured to build a robot to perform various functions
For example, they could snap together a spider bot that can be lowered into a lava tube to drill for frozen water. The same parts could also be reconfigured to make a goat/ox combination to transport solar panels.
“You could imagine a shed on the moon with shelves of worms,” says team leader George Lordos, a Ph.D. candidate and graduate instructor in MIT’s Department of Aeronautics and Astronautics (AeroAstro), in reference to the independent, articulated robots that carry their own motors, sensors, computer, and battery. “Astronauts could go into the shed, pick the worms they need, along with the right shoes, body, sensors, and tools, and they could snap everything together, then disassemble it to make a new one. The design is flexible, sustainable, and cost-effective.”
Video on WORMS-1 in action:





