Researchers at MIT have developed a modular soft robotic gripper capable of identifying and handling everyday objects, from CDs and hairbrushes to fragile objects like eggs.
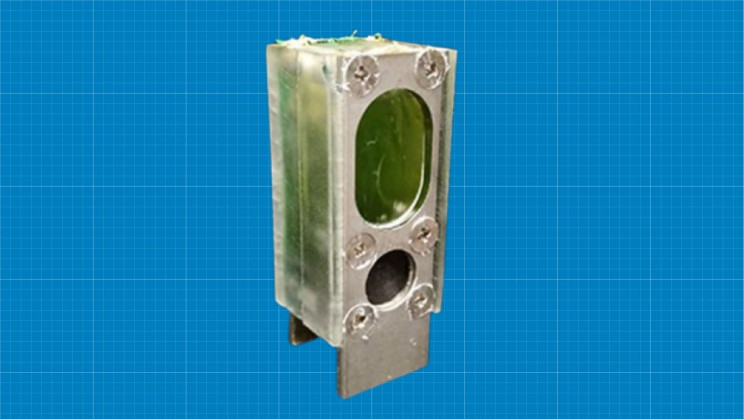
Designed, built, and tested by engineers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), the new modular soft robotic gripper uses two techniques, the pinch and the full envelope, for grasping objects with its three silicone rubber fingers.
Gripping a CD, for example, requires the robot to use the pinch while gripping an egg requires the full envelope technique for more protective handling.
The gripper utilizes sensors to measure the shape of an object and relay the data to the robot’s central processing unit, which it processes in order to expedite future gripping experiences.
“As a human, if you’re blindfolded and you pick something up, you can feel it and still understand what it is,” Robert Katzschmann, a Ph.D. candidate and researcher at CSAIL, said in a press release. “We want to develop a similar skill in robots — essentially, giving them ‘sight’ without them actually being able to see.”
The modular soft robotic gripper is classified as “soft” because the robot is comprised of non-traditional materials like paper and synthetic fibers.
“If we want robots in human-centered environments, they need to be more adaptive and able to interact with objects whose shape and placement are not precisely known,” explained Daniela Rus, the director of CSAIL’s Distributed Robotics Lab. “Our dream is to develop a robot that, like a human, can approach an unknown object, big or small, determine its approximate shape and size, and figure out how to interface with it in one seamless motion.”